

M. Sc. Lukas Köhrer
- Research Associate
- Group:
FZI
- Phone: +49 721 9654-189
- koehrer ∂does-not-exist.fzi de
FZI Forschungszentrum Informatik
Haid-und-Neu-Str. 10–14
76131 Karlsruhe, Germany
Curriculum Vitae
Lukas Köhrer studied electrical engineering and information technology at the Karlsruhe Institute of Technology (KIT) with a focus on control systems (Bachelor in 2015). He collected practical experiences in the design of trajectory tracking controllers for driverless transportation systems at the pre-development division of SEW-EURODRIVE GmbH & Co. KG. In 2018 he concluded his studies with his master thesis on the design and stability analysis of a holistic model predictive vehicle dynamics control for a four-wheel drive, four-wheel steering vehicle at the Institute of Control Systems (IRS).
Since January 2019, he is working as a research scientist at the department Control in Information Technology (CIT) in the research division Embedded Systems and Sensors Engineering (ESS) at the FZI Research Center for Information Technology.
Research
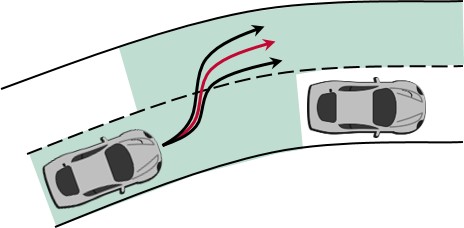
Predictive and Combined Lateral and Longitudinal Motion Planning for Highly Automated Vehicles
Highly automated driving systems have to cover a high number of time-critical driving scenarios. Thus, trajectory-based approaches are used for motion planning and control, because these approaches are formally capable of handling all relevant driving maneuvers. Existing optimization-based approaches are currently constrained to a subset of all relevant maneuvers or the physical coupling of lateral and longitudinal motion is neglected in the planning step, due to high computational effort. To overcome these deficiencies, we are developing novel optimization-based approaches for combined lateral and longitudinal motion planning.
| Title | Type |
|---|---|
| Sicher lernende Trajektorienplanung für hochautomatisierte Fahrzeuge | Master Thesis |
| Title | Type | Person in Charge |
|---|---|---|
| Kollisionsbeschränkungen für optimierungsbasierte Trajektorienplaner für hochautomatisierte Fahrzeuge | Master Thesis |
Publications
Krebs, S.; Köhrer, L.; Hohmann, S.
2016. 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, United Kingdom, 19-21 April 2016, 1–6, Curran. doi:10.1049/cp.2016.0336
Krebs, S.; Köhrer, L.; Hohmann, S.
2016. ICCAIS 2016 - International Conference on Control Automation & Information Sciences, October 27-29, 2016, Ansan, Korea, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ICCAIS.2016.7822445