Optimal robot operation for wire harness production
- Subject:Cyber-Physical Robotics
- Type:Mastersthesis
- Date:ASAP
- Supervisor:
- Links:Tender
-
During this thesis, the optimal on demand planing of robot action during batch size
one wire harness production is examined
MOTIVATION:
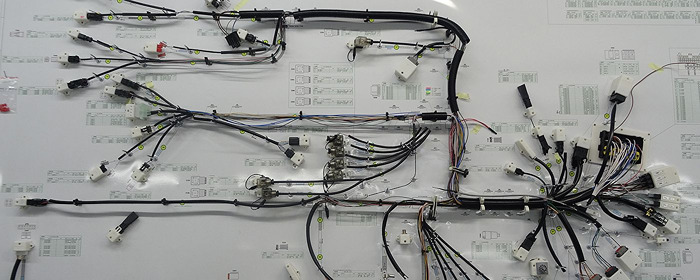
Wire harness production is predominantly a manual process, where each wire
is meticulously prepared by hand on assembly boards (Figure 1). Workers are
well-versed in every step of the process and can adapt flexibly to various situ-
ations. Their ability to perform highly dexterous movements, such as pushing
occluding wires aside while pinning another wire, is crucial.
However, when automating this process with robots, the inherent human exper-
tise is absent. Robotic movements are governed by predetermined algorithms,
making it challenging to handle unforeseen situations effectively. Additionally,
robots lack the dexterity of human operators, leading to additional constraints
during production, such as the order of pinning wires.
This underscores the need for developing a comprehensive wiring strategy to
bridge the gap between manual dexterity and robotic automation.
Cooperation partner:
Kromberg & Schubert is a globally leading specialist with 120 years company
history in wiring systems for the automotive industry. The company offers
significant prospects in a forward-looking industry. Kromberg & Schubert is
experienced and popular among working students and interns. They support
practical thesis projects with substantial input and commitment. The company
is open to subsequent employment if it suits both parties.
GOALS:
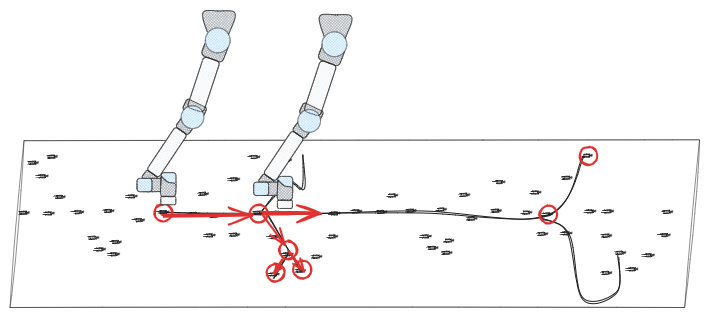
The aim of this thesis is to develop a rule-based method for structuring the
wire harness manufacturing process to optimize robot operation (Figure 3).
To achieve this, the manufacturing process will first be analyzed. Based on
discussions with members of Kromberg & Schubert, the necessary rules will be
established. Subsequently, the method will be tested through simulation. To
further the understanding of the current manufacturing processes, a visit of a
European production plant is possible.
HELPFUL PRIOR KNOWLEDGE:
- Robotics
- Optimization theory
- Interest in robotic manufacturing processes