Analysis of modeling methods for soft robots
- Subject:Soft Robot Modelling
- Type:Mastersthesis
- Supervisor:
- Links:Tender
-
The goal of this Thesis is the analysis of common modeling methods of Continuum Manipulators
MOTIVATION:
The context of Industry 4.0 is making human-robot collaboration increasingly important.
It promises to combine the repeatability and precision of robots with the flexibility and decision-making skills of humans.
Therefore, robots that are small, light, and have torque sensors are being developed to make them safe for close physical coupling with humans.
However, safety is only guaranteed through sensors and software.
In a fail-state, the robot can still harm the human.
As a result, a completely new kind of robot emerged, the soft robot.
Mostly, they consist of soft materials like cloth or silicon and are actuated pneumatically instead of motors.
Such robots are inherently safe for direct human-robot coupling.
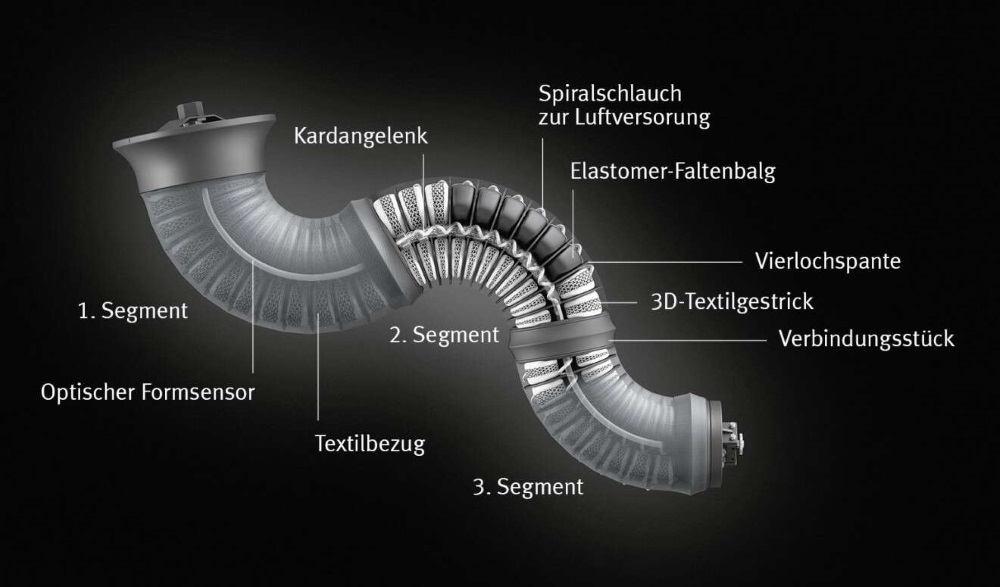
An example of a soft robot can be seen in figure 1.
To get the soft robots out of research and into industrial use, tools for implementing them in automation systems are required.
One important aspect is the machine and human-readable description of such a robot.
GOALS:
The goal of this thesis is to establish a structured overview of attributes and parameters necessary for mathematically modeling a soft robot.
This is quite a challenging due to the vast amounts of different methods.
Important is to have the smallest set of parameters, that can be used for as many modeling methods possible.
The different methods include the Cosserat model for the exact representation, as well as discretization methods like the Piece-Wise Constant Curvature (PCC), or Piece-Wise Variable Curvature (PVC).
HELPFUL PRIOR KNOWLEDGE:
- Soft Robotics
- Robotics
- Control Theory
- Modeling Theory