Development of an Information-Based Constraints Model for Cooperative Robot-Robot Automated Motion Planning
- Subject:Modeling for Cooperative Motion Planning in Industrial Processes
- Type:Master Thesis
- Supervisor:
-
Tender
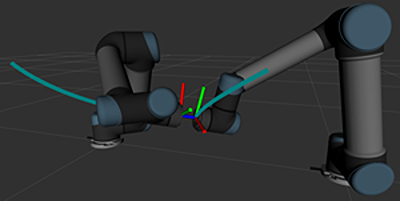
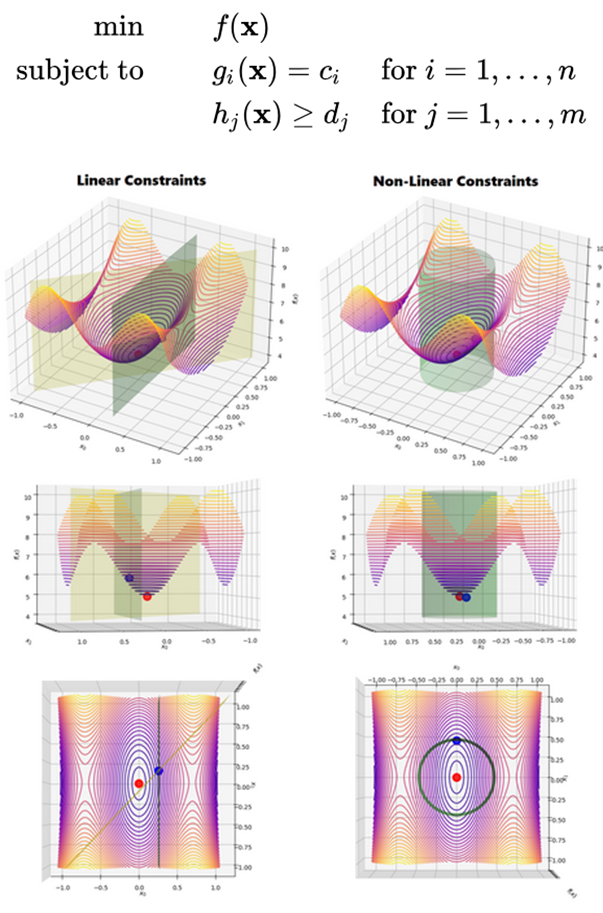
This thesis aims to develop a standardized description of constraints for cooperative motion planning between two robots and validate it in a real world test-case of a rendez-vous optimization problem.
Motivation
Motion planning remains one of the most researched topics in robotics. However, for successful execution of real motion plans, the constraining conditions and dependencies are hardly considered but highly decisive factors. In the case of cooperative robotics, the relationships and dependencies that the robots enact on each other add to complexity of boundary conditions that limit the motion planning task. Thus, not only classic collision avoidance, e.g. solved via Octomaps, becomes relevant, but also the dynamic and geometric relations that the robots must fulfill before, during and after executing a trajectory.
Despite the difficulty that it poses, the definition of constraints in robot-robot cooperative processes is still done by manually considering and defining the limitations of a task in the code itself, which causes a loss of flexibility and adaptability in the general architecture of a process. This problem becomes more noticeable in the case of large scale industrial processes which aim to have large, highly adaptive production plants.
For this reason, a standardized definition of constraints for the motion planning problem is necessary. The goal is to describe the attributes, rules and relationships that govern the modeled entity. This thesis will aim to model cooperative task constraints so that their, ideally intuitive, definition happens independently of the motion planning algorithm used and lends itself for easy automatic generation of the mathematical formulations used in the later motion planning. Additionally the motion planning pipeline for cooperative tasks must also be developed in conjunction with the model to showcase and validate the results of the thesis.
Goals:
The goal of this thesis is to develop a constraints model and motion planning pipeline for cooperative tasks in an abstraction level that results in intuitive understanding for human integrators. The model should be able to define constraints regardless of the specific motion planning framework used afterwards. For this, it is necessary to investigate and define clusters of constraints and dependency types, as well as creating a classification. The resulting motion planning pipeline will be implemented and tested on real cooperative robots and showcased in the institute's lab. The validation scenario is a meeting point (rendez-vous) optimization and planning problem.
HELPFUL PRIOR KNOWLEDGE:
- Interest in robotic industrial processes
- Ideally programming skills in Python and/or C++
- Knowledge in robotics beneficial