Entwicklung eines informationsbasierten Constraints-Modells für kooperative Robot-Robot automatisierte Bewegungsplanung
- Forschungsthema:Modellierung für kooperative Bewegungsplanung in industrielle Prozesse
- Typ:Masterarbeit
- Betreuung:
-
Diese Arbeit zielt darauf ab, eine standardisierte Beschreibung von Constraints für die kooperative Bewegungsplanung zwischen zwei Robotern zu entwickeln und sie in einem realen Testfall eines Rendezvous-Optimierungsproblems zu validieren.
Motivation
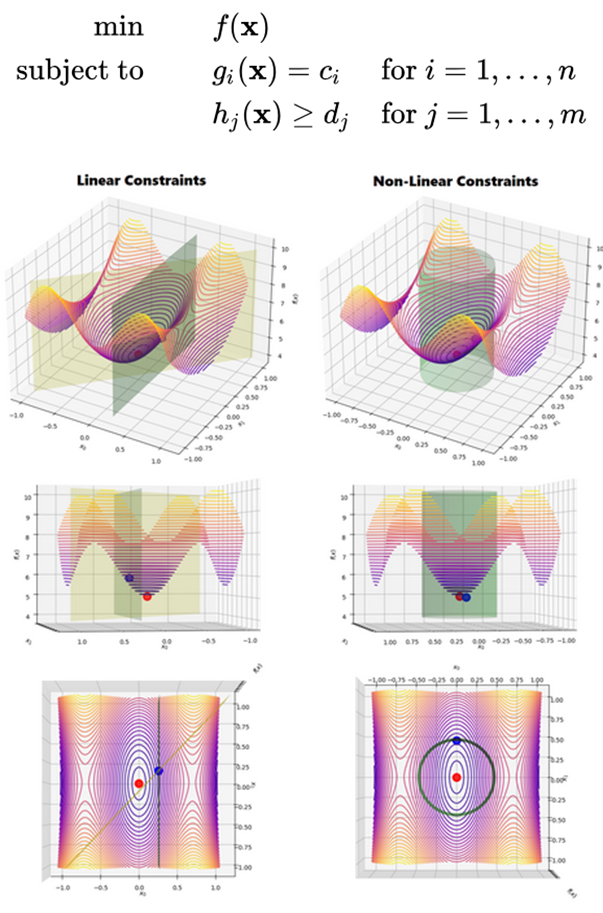
Bewegungsplanung bleibt eines der am meisten erforschten Themen in der Robotik. Für die erfolgreiche Ausführung realer Bewegungspläne werden jedoch die einschränkenden Bedingungen und Abhängigkeiten (Constraints) kaum berücksichtigt, obwohl sie entscheidende Faktoren darstellen. Im Fall der kooperativen Robotik erhöhen die Beziehungen und Abhängigkeiten, die die Roboter untereinander eingehen, die Komplexität der Randbedingungen, die die Bewegungsplanung einschränken. Daher wird nicht nur die klassische Kollisionsvermeidung, z. B. gelöst über Octomaps, relevant, sondern auch die dynamischen und geometrischen Beziehungen, die die Roboter vor, während und nach der Ausführung einer Trajektorie erfüllen müssen.
Trotz der damit verbundenen Schwierigkeiten erfolgt die Definition von constraints in Roboter-Roboter-Kooperationsprozessen bislang manuell, indem die Begrenzungen einer Aufgabe direkt im Code berücksichtigt und definiert werden. Dies führt zu einem Verlust an Flexibilität und Anpassungsfähigkeit in der allgemeinen Architektur eines Prozesses. Dieses Problem wird bei groß angelegten industriellen Prozessen, die auf hochgradig adaptive Produktionsanlagen abzielen, noch deutlicher.
Aus diesem Grund ist eine standardisierte Definition von constraints für das Bewegungsplanungsproblem erforderlich. Ziel ist es, die Attribute, Regeln und Beziehungen zu beschreiben, die die modellierte Entität bestimmen. Diese Arbeit soll kooperative Aufgaben-constraints so modellieren, dass ihre – idealerweise intuitive – Definition unabhängig vom verwendeten Bewegungsplanungsalgorithmus erfolgt und sich für die einfache automatische Generierung der mathematischen Formulierungen eignet, die in der späteren Bewegungsplanung verwendet werden. Darüber hinaus muss die Bewegungsplanungs-Pipeline für kooperative Aufgaben zusammen mit dem Modell entwickelt werden, um die Ergebnisse der Arbeit zu demonstrieren und zu validieren.
ZIELE:
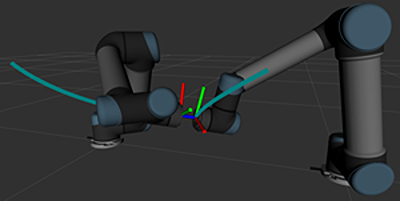
Das Ziel dieser Arbeit ist es, ein Constraints-Modell und eine Bewegungsplanungs-Pipeline für kooperative Aufgaben auf einer Abstraktionsebene zu entwickeln, die ein intuitives Verständnis für menschliche Integratoren ermöglicht. Das Modell sollte in der Lage sein, Constraints unabhängig vom später verwendeten Bewegungsplanungs-Framework zu definieren. Dazu ist es notwendig, Cluster von Constraints und Abhängigkeitstypen zu untersuchen und zu definieren sowie eine Klassifikation zu erstellen. Die resultierende Bewegungsplanungs-Pipeline wird implementiert und an realen kooperativen Robotern getestet und im Labor des Instituts demonstriert. Das Validierungsszenario ist ein Optimierungs- und Planungsproblem für einen Treffpunkt (Rendezvous).
HILFREICHE VORKENNTNISSE:
- Interesse an industrielle robotische Prozesse
- Programmierkenntnisse vorteilhaft
- Kenntnisse in der Robotik vorteilhaft