NL2Drivetrain: Knowledge-Based automated Multi‑Physics Drivetrain Simulation from Natural Language
- Subject:Cyber-Physical Robotics
- Type:Mastersthesis
- Date:ASAP
- Supervisor:
- Links:Tender
-
This thesis will develop a workflow to automatically configure multi-physics drivetrain simulations from natural-language descriptions including expert knowledge.
MOTIVATION:
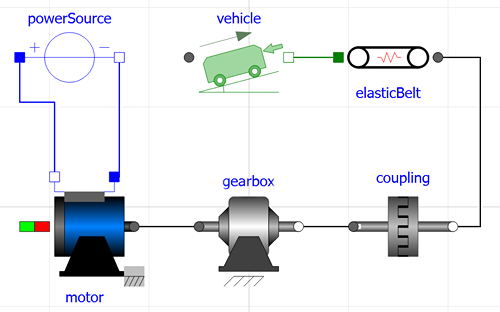
Multi‑physics simulations are an essential tool for validating mechatronic systems. For electric drive configurations, they enable engineers to verify the behaviour of a selected component arrangement across the entire drivetrain before building hardware. Virtual testing prior to commissioning is crucial to detect and avoid errors that would otherwise appear during physical integration. Creating complete simulation configurations manually is time‑consuming. Although information models can automate much of this effort, they are often unavailable in practice. To accelerate the process, modern large language models (LLMs) have been proposed as a means to generate simulation configurations from natural‑language input. However, to achieve a high level of reliability and to ensure correct integration of heterogeneous simulation models, LLM outputs should be grounded in formalized domain knowledge and constrained by explicit rules and verification steps.
GOALS:
The aim of the thesis is to develop a pipeline that accepts a natural‑language description of a drivetrain and its intended tests and produces a ready‑to‑run multi‑physics simulation configuration. The work will parse and interpret the natural‑language input to determine component selections and operating scenarios, parameterize existing component models (for example electrical machines and applications) according to the derived parameters, and automatically connect and configure the available models into a coherent, executable simulation of the whole drivetrain. In parallel, the necessary procedural and domain knowledge for simulation configuration will be formalized in a knowledge base so that the language‑driven components rely on verifiable facts, constraints and transformation rules, thereby reducing the risk of erroneous or hallucinatory outputs. The project includes an evaluation with a prototype implementation that demonstrates the pipeline on at least two drivetrain configurations.
HELPFUL PRIOR KNOWLEDGE:
- Confidence working with modeling tools (Modelica)
- Programming skills and a passion for software development
- Lectures Digital Twin Engineering (DTE) or Cyber-Physical Modeling (CPM)