Integration of a Soft Robot into VR
- Subject:Cyber-Physical Robotics
- Type:Bachelorthesis
- Date:ASAP
- Supervisor:
- Links:Tender
-
During this thesis, a soft robot based on the piece-wise constant curvature model is to be integrated into the virtual reality.
MOTIVATION:
Human-robot collaboration is increasingly becoming a crucial area of research within the context of Industry 4.0.
It promises to combine the repeatability and precision of robots with the flexibility and decision-making skills of humans.
Therefore, robots are being developed that are small, light and have torque sensors implemented to make them safe for close physical coupling with humans.
But the safety is only guaranteed through the sensors and software.
In a fail-state, the robot can still harm the human.
As a result, a completely new kind of robot emerged, the soft robot.
These robots are developed with the safety by design concept in mind.
Mostly, they consist of soft materials like cloth or silicon and are actuated pneumatically instead of with motors.
Such robots are inherently safe for direct human-robot coupling.
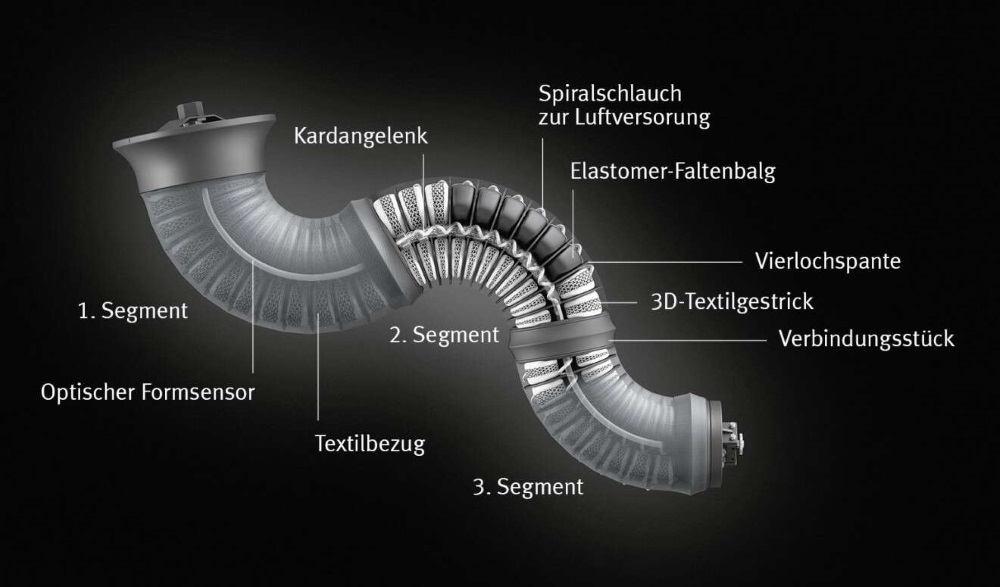
An example of a soft robot can be seen in figure 1.
To make the deployment of these robots easier simulation tools are required.
One such simulation should be developed during the course of this thesis.
GOALS:
The goal of this thesis is to integrate a soft robot into the virtual reality.
At this moment, the IRS works on an extensive virtual reality digital twin of the whole lab infrastructure in Unity.
Within this simulation, virtual robot collaboration and simulation is a big focus.
Therefore, the goal of the thesis is to integrate a soft robot into the virtual reality.
It is important, that the integration is modular and based on a definable parameter set.
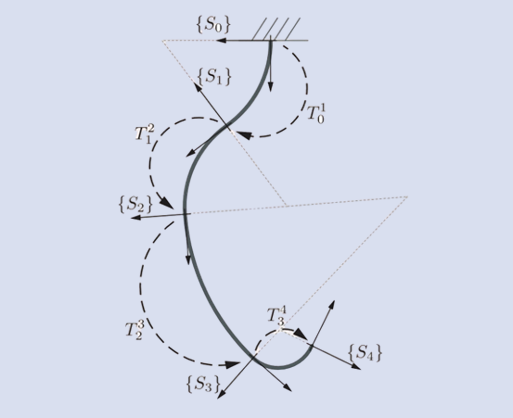
As a starting point a piece-wise constant curvature model of the soft robot will be assumed.
Which means, the robot consists of multiple segments and each segment has the constraint of a constant curvature (see figure 4).
HELPFUL PRIOR KNOWLEDGE:
- Soft Robotics
- Robotics
- Control Theory
- ROS2
- Unity