M. Sc. Xin Ye
- Research Associate
- Group:
- Phone: +49 721 9654-181
- Ye ∂does-not-exist.fzi de
Embedded Systems and Sensors Engineering (ESS)
FZI Forschungszentrum Informatik
Haid-und-Neu-Str. 10–14
76131 Karlsruhe, Germany
Curriculum Vitae
Studies of Mechanical Engineering and Automation at Shanghai Jiao Tong University. Bachelor thesis on the development of an autopilot for quadcopters (2016). Intership at GE Healthcare in process control (2017). Studies of Mechatronics and Information Technology at Karlsruhe Institute of Technology (KIT). Intership at Bosch Engineering GmbH on localisation and perception of railway vehicles (2019). Master thesis at IRS on decentralized planning and control in belief space for the human-machine interaction in multi-robot scenarios (2020). Member of the scientific staff of IRS since April 2021.
Research
Cooperation of Coupled Multi-Robot Systems
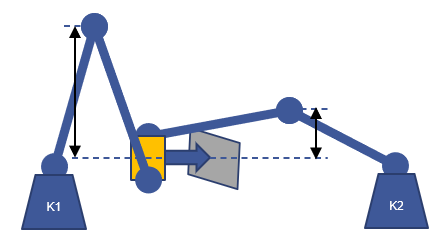
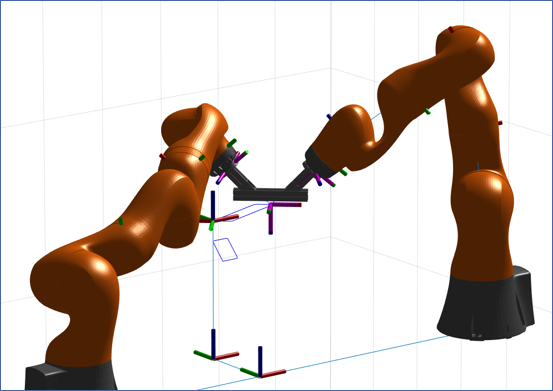
By means of physical coupling between multiple cooperating robots, new systems can be created with capabilities going beyond those of individual subsystems. This is particularly important in manufacturing processes, where coupled robots provide higher stiffness and positioning resolution, resulting in a better manufacturing quality. To optimally unfold these capabilities of robots, which depend heavily on variables such as placement, joint angle configuration, and motor power, it should be determined in the manufacturing process planning, which robots are to be coupled at what time and what actions should be carried out.
The goal of this research project is therefore the development of methods planning the optimal cooperative actions for physically coupled multi-robot systems. These planning methods form a multi-layered architecture from the level of symbolic task allocation through the assignment of sub-tasks and roles towards the generation of trajectories.