

M. Sc. Xin Ye
- Wissenschaftlicher Mitarbeiter
- Gruppe:
FZI
- Tel.: +49 721 9654-181
- Ye ∂does-not-exist.fzi de
Embedded Systems and Sensors Engineering (ESS)
FZI Forschungszentrum Informatik
Haid-und-Neu-Str. 10–14
76131 Karlsruhe, Germany
Lebenslauf
Studium des Maschinenbaus und der Automatisierung an der Shanghai Jiao Tong University. Bachelorarbeit zur Entwicklung eines Autopilots für Quadrokopter (2016). Praktikum bei GE Healthcare in der Prozessleittechnik (2017). Studium der Mechatronik und Informationstechnik am Karlsruher Institut für Technologie (KIT). Praktikum bei Bosch Engineering GmbH zur Lokalisierung und Perzeption für Schienenfahrzeuge (2019). Masterarbeit am IRS zum Thema dezentralisierte Planung und Regelung im Belief-Space für die Mensch-Maschine-Interaktion in Multi-Roboter-Szenarien (2020). Seit April 2021 Wissenschaftlicher Mitarbeiter am IRS.
Forschung
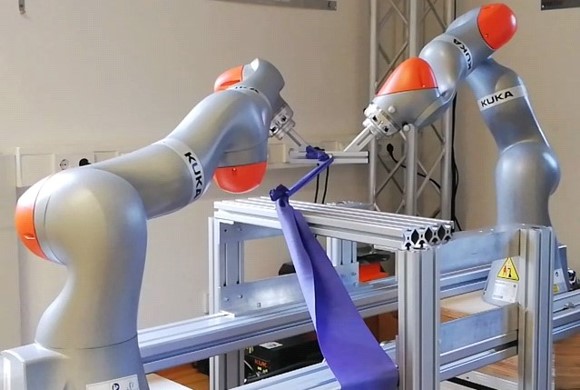
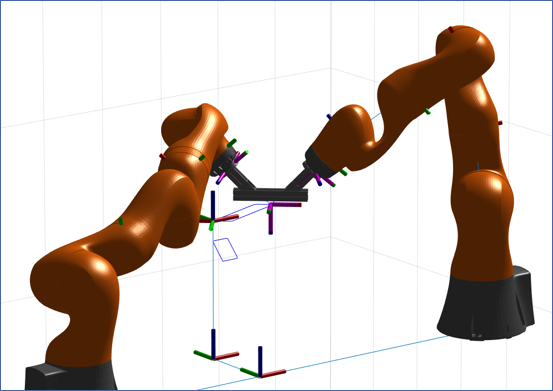
Kooperation gekoppelter Multi-Roboter-Systeme
Durch die physische Kopplung mehrerer kooperierenden Roboter entstehen Systeme, deren Fähigkeiten über die der einzelnen Teilsysteme hinausgehen. Dies ist besonders von Bedeutung in Fertigungsprozessen, wo gekoppelte Roboter höhere Steifigkeit, Positionierauflösung sowie daraus resultierende bessere Fertigungsqualität aufweisen können. Zur optimalen Entfaltung dieser Roboterfähigkeiten, die stark von Zustandsgrößen wie der Positionierung, Gelenkwinkelkonfiguration und Motorleistung abhängen, soll bei der Planung der Fertigungsprozesse bestimmt werden, welche Roboter zu welcher Zeit gekoppelt werden und welche Aktionen ausführen müssen.
Ziel dieses Forschungsprojektes ist daher die Entwicklung der Planungsmethoden zur optimalen kooperativen Handlung für physisch gekoppelte Multi-Roboter-Systeme. Diese Planungsmethoden bilden eine mehrschichtige Architektur von der Ebene der symbolischen Aufgabenallokation über Unteraufgaben- und Rollenzuteilung bis zur Generierung der Trajektorien.
Publikationen
Ye, X.; Grobbel, M.; Schürmann, T.; Schwab, S.; Hohmann, S.
2026. The International Journal of Robotics Research, 1. doi:10.1177/02783649251400381
Ye, X.; Majer, N.; Schwab, S.; Hohmann, S.
2025. IFAC-PapersOnLine, 59 (17), 209–214. doi:10.1016/j.ifacol.2025.10.165
Ye, X.; Schwartz, M.; Hohmann, S.
2023. 2023 European Control Conference (ECC), 1–8, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/ECC57647.2023.10178292
Ye, X.; Schwartz, M.; Hohmann, S.
2022. IFAC-PapersOnLine, 55 (38), 55–60. doi:10.1016/j.ifacol.2023.01.133
Ye, X.; Shen, W.; Mamaev, I.; Bertram, T.; Bryg, M.; Schwartz, M.; Hohmann, S.; Asfour, T.; Hein, B.; Kipfmueller, M.; Kotschenreuther, J.
2022. 54th International Symposium on Robotics : (ISR Europe 2022) : 20-21 June 2022, Munich, Germany, 1–8, VDE Verlag
Mühlbeier, E.; Oexle, F.; Gönnheimer, P.; Fleischer, J.; Ye, X.; Hohmann, S.; Mamaev, I.; Bertram, T.; Bryg, M.; Kotschenreuther, J.; Kipfmüller, M.; Bremer, F.; Matthiesen, S.; Arndt, T.; Schulze, V.
2021. Zeitschrift für wirtschaftlichen Fabrikbetrieb, 116 (11), 847–851. doi:10.1515/zwf-2021-0179