

Vision
Wie interagieren Menschen und automatisierte Systeme in Zukunft?
Wie lassen sich Synergien in der Zusammenarbeit von Menschen und Maschinen im Kontext der Industrie 4.0 nutzen?
Die Forschungsgruppe Kooperative Systeme entwickelt Konzepte zur Modellierung und Regelung der Interaktion zwischen Menschen und Maschinen. Die individuellen Stärken von Mensch und Maschine werden hierbei kombiniert, um hochperformante Systeme zu erschaffen, welche die zukünftigen Herausforderungen der Automatisierungstechnik bewältigen können. Die Anwendungsgebiete finden sich beispielsweise bei hochentwickelten Fahrerassistenzsystemen oder in der Robotik, Medizintechnik sowie Luft- und Raumfahrttechnik.
Kooperativer Regelkreis
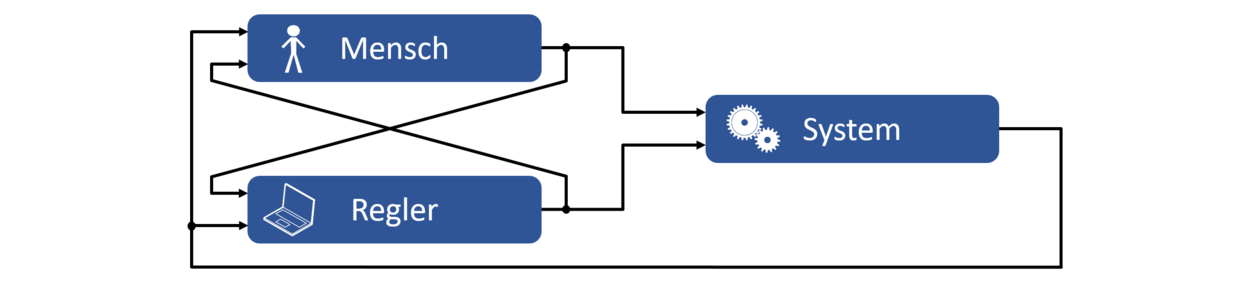
Modellierung und IdentifikationDie Modellierung kooperativer Systeme bildet die Basis des Automatisierungsentwurfs für kooperative Szenarien. In diesem Zusammenhang müssen Unsicherheiten sowohl bezüglich der Wahrnehmung als auch bei den Bewegungen und Handlungen explizit berücksichtigt werden. Des Weiteren wird durch Semantik eine strategische Beschreibung der Interaktion ermöglicht. Außerdem spielt die Identifikation menschlichen Verhaltens eine wesentliche Rolle beim Entwurf der Automation.
|
ReglerentwurfDer Reglerentwurf in kooperativen Szenarien erfordert eine dynamische Rollenverteilung. Des Weiteren muss die Automation in der Lage sein, ein gemeinsames Ziel mit dem menschlichen Interaktionspartner zu verhandeln. Ein möglicher Ansatz, kooperative Systeme zu regeln, basiert auf der Verwendung von Spieltheorie und Modellprädiktiver Regelung (MPR). Für eine echtzeitfähige Realisierung werden zudem sogenannte Bewegungsprimitive untersucht. |
Versuchsaufbauten
 |
Mithilfe eines Motion-Tracking-Systems können menschliche Bewegungen in diversen Szenarien aufgezeichnet werden um Identifikationsmethoden zu validieren. |
 |
Das IRS verfügt über einen Fahrsimulator mit aktiven haptischen Schnittstellen. Dieser Simulator ermöglicht die Validierung kooperativer Regelungskonzepte im Kontext hochentwickelter Fahrassistenzsysteme. |
 |
Ein neu entwickeltes Ball-auf-Platte-System mit haptischen Schnittstellen ermöglicht die Anwendung kooperativer Identifikations- und Regelungsmethoden in dynamischen Situationen. |
Wissenschaftliche Mitarbeiter
 |
Balint VargaForschungsgruppenleiter Forschungsgebiet: |
||
 |
Christian BraunWissenschaftlicher Mitarbeiter Forschungsgebiet: |
 |
Julian SchneiderWissenschaftlicher Mitarbeiter Forschungsgebiet: |
 |
Philipp KargWissenschaftlicher Mitarbeiter Forschungsgebiet: |
 |
Sean KilleWissenschaftlicher Mitarbeiter Forschungsgebiet: |
 |
Karl HandwerkerWissenschaftlicher Mitarbeiter Forschungsgebiet: |
 |
Felix ThömmesWissenschaftlicher Mitarbeiter Forschungsgebiet: |
 |
Lucas GüntherWissenschaftlicher Mitarbeiter Forschungsgebiet: |
Abschlussarbeiter
 |
Jan HagemannMasterarbeit Entwicklung und Durchführung einer Studie zu menschenzentrierten Kollaborationskonzepten |
|
Meng ZhangMasterarbeit |
|
Zihao ZhangMasterarbeit |
|
Lukas KraußMasterarbeit |
| Titel | Typ | Betreuung |
|---|---|---|
| Coupled simulation environment: macroscopic traffic simulation + human–machine interaction | Masterarbeit | |
| Battery-degradation-aware, safety-critical optimization method for interaction scenarios | Masterarbeit | |
| Model-Based Multi-Agent Inverse Reinforcement Learning | Masterarbeit | |
| Finite-Horizon Inverse Stochastic Differential Games | Masterarbeit | |
| Experimentelle Validierung einer kooperativen robotischen Aufstehhilfe | Bachelor/-Masterarbeit | |
| Projected Gradient Play in Linear Quadratic Games | Masterarbeit | |
| A Game-Theoretic Learning Model Connecting Nash and Stackelberg Equilibria | Masterarbeit | |
| Experimentelle Untersuchung des menschlichen Lernprozesses in Dynamic Games | Bachelor/-Masterarbeit | |
| Entwurf und Implementierung einer kollaborativen Mensch-Mensch-Interaktionsumgebung | Masterarbeit |
Publikationen der Forschungsgruppe
-
Pulse Energy Scaling of Thulium-Doped Fiber Lasers for Nonlinear Conversion into the Mid-Infrared. Dissertation
Schneider, J.
2026, März 25. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000190171 -
Dataset: The Role of Variability in Human-Machine Interaction Experience
Hagemann, J. L.; Kille, S.; Varga, B.
2026, März 6. doi:10.35097/ew1m0akw45k3yazy -
1.1 kW monolithic thulium-doped fiber laser in quasi-continuous-wave operation
Panitzek, D.; Písařik, M.; Picmausová, H.; Schaal, J.; Lautenschläger, J.; Lorenz, D.; Schneider, J.; Eichhorn, M.; Kieleck, C.
2026. Fiber Lasers XXIII: Technology and Systems, 12, SPIE. doi:10.1117/12.3078840 -
1.2 kW peak power quasi-continuous-wave thulium-doped fiber laser
Panitzek, D.; Písařík, M.; Picmausová, H.; Schaal, J.; Lautenschläger, J.; Lorenz, D.; Schneider, J.; Eichhorn, M.; Kieleck, C.
2026. Optics Letters, 51 (2), Art.Nr: 401. doi:10.1364/OL.581863 -
Path-constrained trajectory planning for multi-robot manufacturing systems using null-space descent optimization with reduced Hessian
Ye, X.; Grobbel, M.; Schürmann, T.; Schwab, S.; Hohmann, S.
2026. The International Journal of Robotics Research, 1. doi:10.1177/02783649251400381
-
Actively pulse-shaped 2 mJ, 200 W fiber MOPA at 2048 nm for mid-IR generation in OPOs
Lorenz, D.; Schneider, J.; Romano, C.; Panitzek, D.; Lautenschläger, J.; Eitner, M.; Eichhorn, M.; Kieleck, C.
2025. High-Power Lasers and Technologies for Optical Countermeasures III, 1367506, SPIE. doi:10.1117/12.3075755 -
Actively pulse-shaped linearly polarized 200 W photonic crystal fiber MOPA at 2048 nm with 2 mJ pulse energy
Lorenz, D.; Schneider, J.; Romano, C.; Panitzek, D.; Lautenschläger, J.; Eichhorn, M.; Kieleck, C.
2025. Optics Letters, 50 (14), 4490 – 4493. doi:10.1364/OL.562668 -
All-Fiber Power-Scaling of a Small-core Thulium-doped Fiber Laser at 1931 nm
Lautenschläger, J.; Romano, C.; Lorenz, D.; Schneider, J.; Panitzek, D.; Eichhorn, M.; Kieleck, C.
2025. 2025 Conference on Lasers and Electro-Optics Europe & European Quantum Electronics Conference (CLEO/Europe-EQEC), 1, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CLEO/Europe-EQEC65582.2025.11109217 -
High-Power Actively-Pulse-Shaped 2 mJ Nanosecond-Pulsed Tm 3+ -Doped Photonic Crystal Fiber Amplifier Emitting At 2048 nm
Schneider, J.; Lorenz, D.; Romano, C.; Panitzek, D.; Lautenschläger, J.; Eichhorn, M.; Kieleck, C.
2025. 2025 Conference on Lasers and Electro-Optics Europe & European Quantum Electronics Conference (CLEO/Europe-EQEC), Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CLEO/Europe-EQEC65582.2025.11111105 -
Coordinated trajectory planning of homogeneous and heterogeneous mobile robots in collision avoidance scenarios
Majer, N.; Ye, X.; Schwab, S.; Hohmann, S.
2025. at - Automatisierungstechnik, 73 (5), 319–330. doi:10.1515/auto-2024-0178 -
Actively pulse shaped hybrid rare-earth-doped silica fiber/Ho
Rupp, M.; Lorenz, D.; Goth, K.; Deutsch, J.; Schneider, J.; Romano, C.; Eichhorn, M.; Kieleck, C.
2025. Optics Express, 33 (10), 20467 – 20482. doi:10.1364/OE.559360 -
Time-Extended Multi-Robot Task Allocation - A Reoptimization Framework with Provable Performance. Dissertation
Bischoff, E. S.
2025, März 24. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000180296 -
Cooperative Trajectory Planning through Negotiation for a Stand-Up Aid
Schneider, J.; Shen, Y.; Varga, B.; Hohmann, S.
2025. IFAC-PapersOnLine, 59 (35), 286–291. doi:10.1016/j.ifacol.2025.12.490 -
High-energy rectangular-shaped nanosecond pulses from a 200 W photonic crystal fiber amplifier at 2048 nm
Schneider, J.; Lorenz, D.; Romano, C.; Panitzek, D.; Lautenschläger, J.; Eichhorn, M.; Kieleck, C.
2025. Optica Laser Congress Congress 2025, AW1A.4, Optica Publishing Group (OSA). doi:10.1364/ASSL.2025.AW1A.4 -
High-power actively-pulse-shaped 2 mJ nanosecond-pulsed Tm
Schneider, J.; Lorenz, D.; Romano, C.; Panitzek, D.; Lautenschläger, J.; Eichhorn, M.; Kieleck, C.
2025. The European Conference on Lasers and Electro-Optics - Proceedings Conference on Lasers and Electro-Optics/Europe, CLEO/Europe 2025 and European Quantum Electronics Conference, EQEC 2025, 1, Optica Publishing Group (OSA) -
All-fiber-pumped CSP and ZGP doubly-resonant OPO for high-power Mid-IR generation
Lorenz, D.; Schneider, J.; Romano, C.; Panitzek, D.; Lautenschläger, J.; Eitner, M.; Eichhorn, M.; Kieleck, C.
2025. Optica Laser Congress Congress 2025, ATu5A.4, Optica Publishing Group (OSA). doi:10.1364/ASSL.2025.ATu5A.4 -
>1.14 kW QCW thulium-doped fiber laser at 2 µm
Panitzek, D.; Písařík, M.; Picmausová, H.; Schaal, J.; Lautenschläger, J.; Lorenz, D.; Schneider, J.; Eichhorn, M.; Kieleck, C.
2025. Optica Laser Congress Congress 2025, AW6A.2, Optica Publishing Group (OSA). doi:10.1364/ASSL.2025.AW6A.2 -
Human Variability in Human-Robot Locomotion
Kille, S.; Panchea, A. M.; Hohmann, S.
2025. IFAC-PapersOnLine, 59 (35), 138–143. doi:10.1016/j.ifacol.2025.12.465 -
Real-World Accuracy Improvement for Cooperative Manipulation using Model Predictive Control
Ye, X.; Majer, N.; Schwab, S.; Hohmann, S.
2025. IFAC-PapersOnLine, 59 (17), 209–214. doi:10.1016/j.ifacol.2025.10.165 -
Time-Extended Multi-Robot Task Allocation - A Reoptimization Framework with Provable Performance. Dissertation
Bischoff, E. S.
2025. KIT Scientific Publishing. doi:10.5445/KSP/1000183488 -
Consideration of communication in human–machine interaction for cooperative trajectory planning
Schneider, J.; Varga, B.; Hohmann, S.
2025. Frontiers in Robotics and AI, 12, Art.-Nr.: 1568402. doi:10.3389/frobt.2025.1568402
-
Cooperative trajectory planning: principles for human-machine system design on trajectory level
Schneider, J.; Varga, B.; Hohmann, S.
2024. at - Automatisierungstechnik, 72 (12), 1121–1129. doi:10.1515/auto-2024-0083 -
Rugged and miniaturizable all-fiber system applied to mid-IR generation via ZGP OPO pumping
Lorenz, D.; Rupp, M.; Romano, C.; Panitzek, D.; Schneider, J.; Lautenschläger, J.; Eichhorn, M.; Kieleck, C.
2024. M. Eichhorn, G. D. Lewis & W. L. Bohn (Hrsg.), High-Power Lasers and Technologies for Optical Countermeasures II, Edinburgh, 16th-20th September 2024, Art.-Nr.: PC132010A, SPIE. doi:10.1117/12.3031929 -
Adaptive Model Predictive Control for Differential-Algebraic Systems towards a Higher Path Accuracy for Physically Coupled Robots
Ye, X.; Handwerker, K.; Hohmann, S.
2024. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 14th - 18th October 2024, Abu Dhabi, 8497–8503. doi:10.1109/IROS58592.2024.10802620 -
Human-Variability-Respecting Optimal Control for Physical Human-Machine Interaction
Kille, S.; Leibold, P.; Karg, P.; Varga, B.; Hohmann, S.
2024. 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN 2024), 1595–1602, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/RO-MAN60168.2024.10731297 -
High-energy nanosecond pulse extraction from a Tm
Schneider, J.; Lassiette, H.; Lorenz, D.; Forster, P.; Lautenschläger, J.; Panitzek, D.; Romano, C.; Eichhorn, M.; Kieleck, C.
2024. Optics Express, 32 (18), 32309–32321. doi:10.1364/OE.531146 -
Trustworthiness of Optimality Condition Violation in Inverse Dynamic Game Methods Based on the Minimum Principle
Karg, P.; Kienzle, A.; Kaub, J.; Varga, B.; Hohmann, S.
2024. IEEE Conference on Control Technology and Applications (CCTA 2024), 824–831, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CCTA60707.2024.10666619 -
Bi-Level-Based Inverse Stochastic Optimal Control
Karg, P.; Hess, M.; Varga, B.; Hohmann, S.
2024. 2024 European Control Conference (ECC), 537–544, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/ECC64448.2024.10591104 -
Simulation and investigation of conduction-driven thermal blooming at 2055 nm
Lorenz, D.; Rupp, M.; Panitzek, D.; Romano, C.; Forster, P.; Schneider, J.; Eichhorn, M.; Kieleck, C.
2024. H. Hemmati & B. S. Robinson (Hrsg.), Free-Space Laser Communications XXXVI, San Francisco, 27th January - 1st February 2024, 68, SPIE. doi:10.1117/12.3003038 -
Validation of Human-Variability Respecting Optimal Control: A Preparational Study
Kille, S.; Sobeloff, L.; Fritz, S. A.; Varga, B.; Hohmann, S.
2024. IFAC-PapersOnLine, 58 (30), 272–277. doi:10.1016/j.ifacol.2025.01.193 -
Actively pulse shaped linearly polarized nanosecond hybrid Ho
Lorenz, D.; Rupp, M.; Panitzek, D.; Romano, C.; Schneider, J.; Goth, K.; Deutsch, J.; Eichhorn, M.; Kieleck, C.
2024. (A. Michailovas, J. I. Mackenzie, F. Pirzio & E. Cormier, Hrsg.) EPJ Web of Conferences, 307, Art.-Nr.: 04026. doi:10.1051/epjconf/202430704026 -
Optimization of nanosecond pulse energy extraction from Tm
Schneider, J.; Lorenz, D.; Lautenschläger, J.; Romano, C.; Eichhorn, M.; Kieleck, C.
2024. Proceedings: Laser Congress 2024 (ASSL, LAC, LS&C) : Part of Optica Laser Congress and Exhibition, AM3A.1, Optica Publishing Group (OSA). doi:10.1364/ASSL.2024.AM3A.1 -
1931 nm Thulium MOPA Fiber Laser
Lautenschläger, J.; Romano, C.; Lorentz, D.; Schneider, J.; Panitzek, D.; Rupp, M.; Eichhorn, M.; Kieleck, C.
2024. Proceedings: Laser Congress 2024 (ASSL, LAC, LS&C) : Part of Optica Laser Congress and Exhibition, JW2A.30, Optica Publishing Group (OSA). doi:10.1364/ASSL.2024.JW2A.30 -
Simulation and optimization of a polarized nanosecond hybrid Ho3+ and Tm3+-doped silica fiber & Ho3+:YAG MOPA at 2048 nm targeted for ZGP OPO pumping
Lorenz, D.; Rupp, M.; Panitzek, D.; Romano, C.; Schneider, J.; Goth, K.; Deutsch, J.; Eichhorn, M.; Kieleck, C.
2024. Laser Applications Conference : part of Optica Laser Congress and Exhibition : 20-24 October 2024, Osaka, Japan, AM4A.6, Optica Publishing Group (OSA) -
HoLLiECares - Development of a multi-functional robot for professional care
Schneider, J.; Brünett, M.; Gebert, A.; Gisa, K.; Hermann, A.; Lengenfelder, C.; Roennau, A.; Schuh, S.; Steffen, L.
2024. Frontiers in Robotics and AI, 11, Article no: 1325143. doi:10.3389/frobt.2024.1325143 -
Heuristic reoptimization of time‐extended multi‐robot task allocation problems
Bischoff, E.; Kohn, S.; Hahn, D.; Braun, C.; Rothfuß, S.; Hohmann, S.
2024. Networks, 84 (1), 64–83. doi:10.1002/net.22217 -
The DLR Scout Rover during the 2022 Arches Demomission Space on Mount Etna: Operating the Rover outside of its Comfort Zone
Pignède, A.; Schütt, M.; Franke, D.; Lichtenheldt, R.; Schindler, W.; Braun, C.; Kille, S.; Schneider, J.; Fischer, L.; Witucki, L.; Hohmann, S.; Zhang, S.; Staudinger, E.; Pöhlmann, R.; Broghammer, F.; Dammann, A.; Gentner, C.
2024. Proceedings of the Deutscher Luft- und Raumfahrtkongress 2023, Stuttgart, 1–13, Deutsche Gesellschaft für Luft- und Raumfahrt (DGLR). doi:10.25967/610059
-
Experimental Evaluation of Model Predictive Mixed-Initiative Variable Autonomy Systems Applied to Human-Robot Teams
Ramesh, A.; Braun, C. A.; Rothfuß, S.; Hohmann, S.; Stolkin, R.; Chiou, M.
2023. 2023 IEEE International Conference on Systems, Man, and Cybernetics (SMC), October 1-4, 2023, Hyatt Maui, Hawaii, USA, Institute of Electrical and Electronics Engineers (IEEE) -
Human–Machine Cooperative Decision Making Outperforms Individualism and Autonomy
Rothfuß, S.; Wörner, M.; Inga, J.; Kiesel, A.; Hohmann, S.
2023. IEEE Transactions on Human-Machine Systems, 53 (4), 761–770. doi:10.1109/THMS.2023.3274916 -
Model Predictive fuzzy Control of the Degree of Automation Optimizing Robot Health
Braun, C. A.; Ramesh, A.; Rothfuß, S.; Chiou, M.; Stolkin, R.; Hohmann, S.
2023. 2023 IEEE 17th International Symposium on Applied Computational Intelligence and Informatics (SACI), 000381–000386, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SACI58269.2023.10158596 -
Nanosecond pulsed narrow-linewidth all-fiber source for ZGP-OPO pumping
Lorenz, D.; Romano, C.; Panitzek, D.; Forster, P.; Schneider, J.; Büker, H.; Eichhorn, M.; Kieleck, C.
2023. Optics Continuum, 2 (3), 660 – 669. doi:10.1364/OPTCON.486081 -
Variable Autonomy for Human-Robot Teaming (VAT)
Chiou, M.; Booth, S.; Lacerda, B.; Theodorou, A.; Rothfuß, S.
2023. Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 932–934, Association for Computing Machinery (ACM). doi:10.1145/3568294.3579957 -
Validation of Stochastic Optimal Control Models for Goal-Directed Human Movements on the Example of Human Driving Behavior
Karg, P.; Stoll, S.; Rothfuß, S.; Hohmann, S.
2023. IFAC-PapersOnLine, 56 (2), 8320–8326. doi:10.1016/j.ifacol.2023.10.1021 -
Single-End-Pumped Tm
Forster, P.; Panitzek, D.; Romano, C.; Lorenz, D.; Schneider, J.; Eichhorn, M.; Kieleck, C.
2023. 2023 Conference on Lasers and Electro-Optics Europe & European Quantum Electronics Conference (CLEO/Europe-EQEC), 1–1, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CLEO/Europe-EQEC57999.2023.10232508 -
Enhancement of Path Tracking Accuracy for Physically Coupled Industrial Robots by Hybrid Position-Torque Compensation
Ye, X.; Schwartz, M.; Hohmann, S.
2023. 2023 European Control Conference (ECC), 1–8, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/ECC57647.2023.10178292 -
A Study on Psychological Flow Measure by Human-Machine Interaction Modeling
Kille, S.; Witucki, L.; Rothfuß, S.; Hohmann, S.
2023. IEEE International Conference on Systems, Man, and Cybernetics (SMC) -
Model Predictive Control of the Degree of Automation Optimizing Robot Health
Braun, C. A.; Ramesh, A.; Rothfuß, S.; Chiou, M.; Stolkin, R.; Hohmann, S.
2023. IEEE 17th International Symposium on Applied Computational Intelligence and Informatics (SACI 2023) -
Using a Collaborative Robotic Arm as Human-Machine Interface: System Setup and Application to Pose Control Tasks
Braun, C. A.; Haide, L.; Fischer, L.; Kille, S.; Varga, B.; Rothfuss, S.; Hohmann, S.
2023. 2023 IEEE International Conference on Robotics and Automation (ICRA), Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ICRA48891.2023.10161348 -
Model Predictive Degree of Automation Regulation for Mobile Robots Using Robot Vitals and Robot Health
Braun, C. A.; Ramesh, A.; Rothfuß, S.; Chiou, M.; Stolkin, R.; Hohmann, S.
2023. 22nd World Congress of the International Federation of Automatic Control (IFAC 2023), Yokohama, Japan, 9.–14. Juli 2023 -
Inverse Stochastic Optimal Control for Linear-Quadratic Gaussian and Linear-Quadratic Sensorimotor Control Models
Karg, P.; Stoll, S.; Rothfus, S.; Hohmann, S.
2023. 2022 IEEE 61st Conference on Decision and Control (CDC), 2801–2808, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CDC51059.2022.9992798 -
Excitation for Adaptive Optimal Control of Nonlinear Systems in Differential Games
Karg, P.; Koepf, F.; Braun, C. A.; Hohmann, S.
2023. IEEE transactions on automatic control, 68 (1), 596–603. doi:10.1109/TAC.2022.3145651
-
Human-Machine Symbiosis: A Multivariate Perspective for Physically Coupled Human-Machine Systems
Inga, J.; Ruess, M.; Robens, J. H.; Nelius, T.; Rothfuß, S.; Kille, S.; Dahlinger, P.; Lindenmann, A.; Thomaschke, R.; Neumann, G.; Matthiesen, S.; Hohmann, S.; Kiesel, A.
2022. International Journal of Human-Computer Studies, 170, Article no: 102926. doi:10.1016/j.ijhcs.2022.102926 -
Human-Machine Cooperative Decision Making. Dissertation
Rothfuß, S.
2022, März 25. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000143873 -
Adaptive Dynamic Programming: Solltrajektorienfolgeregelung und Konvergenzbedingungen. Dissertation
Köpf, F.
2022, Januar 20. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000141973 -
Stiffness Optimized Multi-Robot Behavior Planning using Reduced Hessian Method
Ye, X.; Schwartz, M.; Hohmann, S.
2022. IFAC-PapersOnLine, 55 (38), 55–60. doi:10.1016/j.ifacol.2023.01.133 -
Finally! Insights into the ARCHES Lunar Planetary Exploration Analogue Campaign on Etna in summer 2022
Wedler, A.; Müller, M. G.; Schuster, M.; Durner, M.; Lehner, P.; Dömel, A.; Steidle, F.; Vayugundla, M.; Sakagami, R.; Meyer, L.; Smisek, M.; Stürzl, W.; Schmitz, N.; Vodermayer, B.; Prince, A. F.; Ehreiser, A.; Staudinger, E.; Pöhlmann, R.; Zhang, S.; Hellerer, M.; Lichtenheldt, R.; Franke, D.; Pignede, A. F. X.; Schindler, W.; Schütt, M.; Rebele, B.; Boerdijk, W.; Giubilato, R.; Reill, J.; Kuhne, M.; Lee, J.; Schröder, S.; Frohmann, S.; Seel, F.; Dietz, E.; Triebel, R.; Lii, N. Y.-S.; Bischoff, E.; Braun, C.; Kille, S.; Wormnes, K.; Pereira, A.; Carey, W.; Rossi, A. P.; Thomsen, L.; Graber, T.; Krüger, T.; Börner, A.; Irmisch, P.; Bussmann, K.; Paar, G.; Bauer, A.; Völk, S.; Rauer, H.; Hübers, H.-W.; Bals, J.; Hohmann, S.; Asfour, T.; Foing, B.; Albu-Schäffer, A. O.
2022. 73. International Astronautical Congress (IAC), 18-23 September 2022 -
Inverse Stochastic Optimal Control for Linear-Quadratic Gaussian and Linear-Quadratic Sensorimotor Control Models
Karg, P.; Stoll, S.; Rothfus, S.; Hohmann, S.
2022. doi:10.48550/arXiv.2210.17265 -
A Negotiation-Theoretic Framework for Control Authority Transfer in Mixed-Initiative Robotic Systems
Rothfus, S.; Chiou, M.; Inga, J.; Hohmann, S.; Stolkin, R.
2022. 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 921–928, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC53654.2022.9945196 -
Belief Space Control with Intention Recognition for Human-Robot Cooperation
Braun, C. A.; Prezdnyakov, R.; Rothfus, S.; Hohmann, S.
2022. 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 1897–1903, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC53654.2022.9945170 -
Negotiation-based cooperative planning of local trajectories
Schneider, J.; Rothfuß, S.; Hohmann, S.
2022. Frontiers in control engineering, 3, Art.Nr. 1058980. doi:10.3389/fcteg.2022.1058980 -
Limited Information Shared Control: A Potential Game Approach
Varga, B.; Inga, J.; Hohmann, S.
2022. IEEE Transactions on Human-Machine Systems, 53 (2), 282–292. doi:10.1109/THMS.2022.3216789 -
Validation of a Limited Information Shared Controller: A Comparative Study
Varga, B.; Rothfuß, S.; Hohmann, S.
2022. 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 949–954, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC53654.2022.9945512 -
Multi-level optimization approach for multi-robot manufacturing systems
Ye, X.; Shen, W.; Mamaev, I.; Bertram, T.; Bryg, M.; Schwartz, M.; Hohmann, S.; Asfour, T.; Hein, B.; Kipfmueller, M.; Kotschenreuther, J.
2022. 54th International Symposium on Robotics : (ISR Europe 2022) : 20-21 June 2022, Munich, Germany, 1–8, VDE Verlag
-
Personalized Design and Experimental Validation of a Limited Information Cooperative Shared-Controller for Vehicle-Manipulators
Varga, B.; Inga, J.; Hohmann, S.
2021. 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 1489–1494, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC52423.2021.9659023 -
Methoden für inverse dynamische Spiele zur Identifikation des Verhaltens kooperativer Systeme = Inverse dynamic game methods for identification of cooperative system behavior
Inga Charaja, J. J.
2021. Automatisierungstechnik, 69 (8), 734–735. doi:10.1515/auto-2021-0054 -
Passing the Baton between Autopilot and Driver
Karg, P.; Kalb, L.; Bengler, K.; Hohmann, S.
2021. ATZ worldwide, 123 (2), 68–72. doi:10.1007/s38311-020-0609-y -
Staffelstabübergabe zwischen Autopilot und Fahrer
Karg, P.; Kalb, L.; Bengler, K.; Hohmann, S.
2021. Automobiltechnische Zeitschrift, 123 (2), 66–70. doi:10.1007/s35148-020-0636-4 -
Preliminary Results for the Multi-Robot, Multi-Partner, Multi-Mission, Planetary Exploration Analogue Campaign on Mount Etna
Wedler, A.; Müller, M. G.; Schuster, M.; Durner, M.; Brunner, S.; Lehner, P.; Lehner, H.; Dömel, A.; Vayugundla, M.; Steidle, F.; Sakagami, R.; Meyer, L.; Smisek, M.; Stürzl, W.; Schmitz, N.; Vodermayer, B.; Prince, A. F.; Staudinger, E.; Hellerer, M.; Lichtenheldt, R.; Dietz, E.; Braun, C.; Rebele, B.; Boerdijk, W.; Giubilato, R.; Reill, J.; Kuhne, M.; Lee, J.; Villacampa, A. F.; Bargen, I.; Schröder, S.; Frohmann, S.; Seel, F.; Triebel, R.; Lii, N. Y.-S.; Bischoff, E.; Kille, S.; Wormnes, K.; Pereira, A.; Carey, W.; Rossi, A. P.; Thomsen, L.; Graber, T.; Krüger, T.; Kyr, P.; Börner, A.; Bussmann, K.; Paar, G.; Bauer, A.; Völk, S.; Kimpe, A.; Rauer, H.; Hübers, H.-W.; Bals, J.; Hohmann, S.; Asfour, T.; Foing, B.; Albu-Schäffer, A.
2021. Proceedings of the International Astronautical Congress (IAC). Vol A3, Code 177573, International Astronautical Federation (IAF) -
Online Inverse Linear-Quadratic Differential Games Applied to Human Behavior Identification in Shared Control
Inga, J.; Creutz, A.; Hohmann, S.
2021. 2021 European Control Conference (ECC): 29 June – 2 July 2021, Delft, Netherlands, 353–360, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/ECC54610.2021.9655110 -
Wertstromkinematik – Produktionssysteme neu gedacht – Interdisziplinäres Forscherteam arbeitet an der Produktionstechnik der Zukunft (Teil 1)
Mühlbeier, E.; Oexle, F.; Gönnheimer, P.; Fleischer, J.; Ye, X.; Hohmann, S.; Mamaev, I.; Bertram, T.; Bryg, M.; Kotschenreuther, J.; Kipfmüller, M.; Bremer, F.; Matthiesen, S.; Arndt, T.; Schulze, V.
2021. Zeitschrift für wirtschaftlichen Fabrikbetrieb, 116 (11), 847–851. doi:10.1515/zwf-2021-0179 -
Inverse Optimal Control with Continuous Updating for a Steering Behavior Model with Reference Trajectory
Kuchkarov, I.; Mitiai, G.; Petrosian, O.; Lepikhin, T.; Inga, J.; Hohmann, S.
2021. Mathematical Optimization Theory and Operations Research: Recent Trends: 20th International Conference, MOTOR 2021, Irkutsk, Russia, July 5–10, 2021, Revised Selected Papers. Ed.: A. Strekalovsky, 387–402, Springer. doi:10.1007/978-3-030-86433-0_27 -
Entrepreneurship für Ingenieure - Konzeption einer innovativen interdisziplinären Lehrveranstaltung
Belgardt, S.; Doer, C.; Hohmann, S.; Karg, P.; Rothfuß, S.; Siebenrock, F.; Stork, W.; Terzidis, O.; Tittel, A.; Zwick, T.
2021. Handbuch Qualität in Studium, Lehre und Forschung, 76, 67–84 -
Ordinal Potential Differential Games to Model Human-Machine Interaction in Vehicle-Manipulators
Varga, B.; Inga, J.; Lemmer, M.; Hohmann, S.
2021. Proceedings of the IEEE CCTA 2021 : 5th IEEE Conference on Control Technology and Applications, 728–734, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CCTA48906.2021.9658788 -
Adaptive Optimal Trajectory Tracking Control of Continuous-Time Systems
Bührle, E.; Köpf, F.; Inga, J.; Hohmann, S.
2021. 19th European Control Conference, June 29 - July 2, 2021, Rotterdam, Virtual Conference. doi:10.23919/ECC54610.2021.9655005 -
Adaptive Optimal Trajectory Tracking Control Applied to a Large-Scale Ball-on-Plate System
Köpf, F.; Kille, S.; Inga, J.; Hohmann, S.
2021. Proceedings of the 2021 American Control Conference (ACC), 26th - 28th May, New Orleans, LA, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/ACC50511.2021.9482629 -
Inverse Dynamic Game Methods for Identification of Cooperative System Behavior. Dissertation
Inga Charaja, J. J.
2021. KIT Scientific Publishing. doi:10.5445/KSP/1000128612 -
Automatisierte kooperative Transition einer Regelungsaufgabe zwischen Mensch und Maschine am Beispiel des hochautomatisierten Fahrens. Dissertation
Ludwig, J.
2021. KIT Scientific Publishing. doi:10.5445/KSP/1000125864
-
Iterative Method for Online Fractional Order and Parameter Identification
Stark, O.; Karg, P.; Hohmann, S.
2020. 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Korea (South), 14-18 Dec. 2020, 5159–5166, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CDC42340.2020.9304346 -
The n-Stage War of Attrition and its Inverse Game Towards its Application in Human-Machine Cooperative Decision Making
Rothfuß, S.; Tanaka, T. S.; Inga, J.; Hohmann, S.
2020. 2020 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Korea (South), Korea (South), 14-18 Dec. 2020, 5386–5393, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CDC42340.2020.9303952 -
Inverse Dynamic Game Methods for Identification of Cooperative System Behavior. Dissertation
Inga Charaja, J. J.
2020, November 3. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000125587/v2 -
Automatisierte kooperative Transition einer Regelungsaufgabe zwischen Mensch und Maschine am Beispiel des hochautomatisierten Fahrens. Dissertation
Ludwig, J.
2020, Oktober 19. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000124439 -
A Study on Human-Machine Cooperation on Decision Level
Rothfuß, S.; Wörner, M.; Inga, J.; Hohmann, S.
2020. 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11-14 Oct. 2020, 2291–2298, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC42975.2020.9282813 -
Adaptive Optimal Control for Reference Tracking Independent of Exo-System Dynamics
Köpf, F.; Westermann, J.; Flad, M.; Hohmann, S.
2020. Neurocomputing, 405, 173–185. doi:10.1016/j.neucom.2020.04.140 -
Personalisation and Control Transition Between Automation and Driver in Highly Automated Cars
Flad, M.; Karg, P.; Roitberg, A.; Martin, M.; Mazewitsch, M.; Lange, C.; Kenar, E.; Ahrens, L.; Flecken, B.; Kalb, L.; Karakaya, B.; Ludwig, J.; Pruksch, A.; Stiefelhagen, R.; Hohmann, S.
2020. Smart Automotive Mobility: Reliable Technology for the Mobile Human. Ed.: Gerrit Meixner, 1–70, Springer -
Adaptive Dynamic Programming for Model-free Tracking of Trajectories with Time-varying Parameters
Köpf, F.; Ramsteiner, S.; Puccetti, L.; Flad, M.; Hohmann, S.
2020. International journal of adaptive control and signal processing, 34 (7), 839–856. doi:10.1002/acs.3106 -
Partner Approximating Learners (PAL): Simulation-Accelerated Learning with Explicit Partner Modeling in Multi-Agent Domains
Köpf, F.; Nitsch, A.; Flad, M.; Hohmann, S.
2020. 2020 6th International Conference on Control, Automation and Robotics (ICCAR) : April 20-23, 2020, Singapore, 746–752, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ICCAR49639.2020.9108080 -
Speed Tracking Control using Online Reinforcement Learning in a Real Car
Puccetti, L.; Köpf, F.; Rathgeber, C.; Hohmann, S.
2020. 2020, The 6th International Conference on Control, Automation and Robotics, Singapore, April 20 - 23, 2020, ICCAR 2020, 978–1, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ICCAR49639.2020.9108051 -
The ARCHES Moon-Analogue Demonstration Mission: Towards Teams of Autonomous Robots for Collaborative Scientific Sampling in Lunar Environments
Schuster, M. J.; Rebele, B.; Müller, M. G.; Brunner, S. G.; Dömel, A.; Vodermayer, B.; Giubilato, R.; Vayugundla, M.; Lehner, H.; Lehner, P.; Steidle, F.; Meyer, L.; Bussmann, K.; Reill, J.; Stürzl, W.; Bargen, I. von; Sakagami, R.; Smisek, M.; Durner, M.; Staudinger, E.; Pöhlmann, R.; Zhang, S.; Braun, C.; Dietz, E.; Frohmann, S.; Schröder, S.; Börner, A.; Hübers, H.-W.; Triebel, R.; Foing, B.; Albu-Schäffer, A. O.; Wedler, A.
2020. European Lunar Symposium (ELS) -
Magnetic Resonance Fingerprinting Optimization In Magnetic Resonance Imaging
Braun, C. A.; Nadar, M. S.; Chen, X.; Mailhe, B.
2020 -
Bewegungsabhängiges Stabilisierungsunterstützungssystem [Patent]
Kuhn, E.; Kusmartsev, F.; Flad, M.; Hohmann, S.; Köpf, F.
2020 -
Optimal Control and Inverse Optimal Control with Continuous Updating for Human Behavior Modeling
Petrosian, O.; Inga, J.; Kuchkarov, I.; Flad, M.; Hohmann, S.
2020. IFAC-PapersOnLine, 53 (2), 6670–6677. doi:10.1016/j.ifacol.2020.12.089 -
Adaptive Negotiation Model for Human-Machine Interaction on Decision Level
Rothfuß, S.; Ayllon, C.; Flad, M.; Hohmann, S.
2020. IFAC-PapersOnLine, 53 (2), 10174–10181. doi:10.1016/j.ifacol.2020.12.2745 -
A Cooperative Assistant System with Smoothly Shifting Control Authority Based on Partially Observable Markov Decision Processes
Braun, C. A.; Bohn, C.; Inga, J.; Hohmann, S.
2020. 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, October 11–14, 2020., 806–811, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC42975.2020.9283176 -
Multi-Robot Task Allocation and Scheduling Considering Cooperative Tasks and Precedence Constraints
Bischoff, E.; Meyer, F.; Inga, J.; Hohmann, S.
2020. 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, October 11–14, 2020., 3949–3956, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC42975.2020.9283215 -
Cooperative Decision Making in Cooperative Control Systems by Means of Game Theory
Rothfuß, S.; Steinkamp, J.; Flad, M.; Hohmann, S.
2020. Frontiers of Dynamic Games : Game Theory and Management, St. Petersburg, 2019. Ed.: L.A. Petrosyan, 245–265, Birkhäuser Verlag. doi:10.1007/978-3-030-51941-4_15 -
The ARCHES Space-Analogue Demonstration Mission: Towards Heterogeneous Teams of Autonomous Robots for Collaborative Scientific Sampling in Planetary Exploration
Schuster, M. J.; Muller, M. G.; Brunner, S. G.; Lehner, H.; Lehner, P.; Sakagami, R.; Domel, A.; Meyer, L.; Vodermayer, B.; Giubilato, R.; Vayugundla, M.; Reill, J.; Steidle, F.; Von Bargen, I.; Bussmann, K.; Belder, R.; Lutz, P.; Sturzl, W.; Smisek, M.; Moritz, M.; Stoneman, S.; Prince, A. F.; Rebele, B.; Durner, M.; Staudinger, E.; Zhang, S.; Pohlmann, R.; Bischoff, E.; Braun, C.; Schroder, S.; Dietz, E.; Frohmann, S.; Borner, A.; Hubers, H.-W.; Foing, B.; Triebel, R.; Albu-Schaffer, A. O.; Wedler, A.
2020. IEEE Robotics and automation letters, 5 (4), 5315–5322. doi:10.1109/LRA.2020.3007468 -
Reinforcement Learning for Speed Control with Feedforward to Track Velocity Profiles in a Real Vehicle
Köpf, F.; Puccetti, L.; Rathgeber, C.; Hohmann, S.
2020. 23rd IEEE International Conference on Intelligent Transportation Systems (ITSC), September 20 – 23, 2020, Art.Nr. 9294541, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ITSC45102.2020.9294541 -
Deep Decentralized Reinforcement Learning for Cooperative Control
Köpf, F.; Tesfazgi, S.; Flad, M.; Hohmann, S.
2020. 21th IFAC World Congress. Ed.: R. Findeisen, 1555–1562, Elsevier. doi:10.1016/j.ifacol.2020.12.2181 -
Inverse Open-Loop Noncooperative Differential Games and Inverse Optimal Control
Molloy, T. L.; Inga, J.; Flad, M.; Ford, J.; Perez, T.; Hohmann, S.
2020. IEEE transactions on automatic control, 65 (2), 897–904. doi:10.1109/TAC.2019.2921835
-
A Concept for Human-Machine Negotiation in Advanced Driving Assistance Systems
Rothfuss, S.; Schmidt, R.; Flad, M.; Hohmann, S.
2019. IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, 06.10.-09.10.2019, 3116–3123, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2019.8914282 -
Cooperative Decision Making in Cooperative Control Systems by means of Game Theory
Rothfuß, S.; Steinkamp, J.; Flad, M.; Hohmann, S.
2019, Juli 4. 13th International Conference Game Theory and Management (GTM 2019), Sankt Petersburg, Russland, 3.–5. Juli 2019 -
A Continuous and Quantitative Metric for the Levels of Automation
Braun, C. A.; Flad, M.; Hohmann, S.
2019. IFAC-PapersOnLine, 52 (19), 37–42. doi:10.1016/j.ifacol.2019.12.081 -
Personalisierte, adaptive kooperative Systeme für automatisierte Fahrzeuge: Schlussbericht des Karlsruher Instituts für Technologie (KIT) für das BMBF-Forschungsvorhaben PAKoS
Flad, M.; Ludwig, J.; Roitberg, A.; Karg, P.; Stiefelhagen, R.; Hohmann, S.
2019. Technische Informationsbibliothek (TIB) -
Robust Design of a Complex, Perturbed Lateral Control System for Automated Driving
Korus, J.-D.; Karg, P.; Ramos, P. G.; Schütz, C.; Zimmermann, M.; Müller, S.
2019. IFAC-PapersOnLine, 52 (8), 1–6. doi:10.1016/j.ifacol.2019.08.026 -
Differential-Game-Based Driver Assistance System for Fuel-Optimal Driving
Flad, M.
2019. Frontiers of Dynamic Games – Game Theory and Management, St. Petersburg, 2018. Ed.: L. Petrosyan, 13–36, Birkhäuser Verlag. doi:10.1007/978-3-030-23699-1_2 -
Decentralized Path Planning for Cooperating Autonomous Vehicles
Rothfuß, S.; Prezdnyakov, R.; Flad, M.; Hohmann, S.
2019. AUTOREG, Mannheim, 2-3 Juli, 2019, 271–284, VDI Verlag -
Decentralized path planning for cooperating autonomous mobile units
Rothfuß, S.; Prezdnyakov, R.; Flad, M.; Hohmann, S.
2019. Forschung im Ingenieurwesen, 1–11. doi:10.1007/s10010-019-00339-4 -
Validation of a Human Cooperative Steering Behavior Model Based on Differential Games
Inga, J.; Flad, M.; Hohmann, S.
2019. IEEE International Conference on Systems, Man, and Cybernetics (IEEE SMC 2019), Bari, I, October 6-9, 2019, 3124–3129, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2019.8914574 -
Solution Sets for Inverse Non-Cooperative Linear-Quadratic Differential Games
Inga, J.; Bischoff, E.; Molloy, T. L.; Flad, M.; Hohmann, S.
2019. IEEE Control Systems Letters, 3 (4), 871 – 876. doi:10.1109/LCSYS.2019.2919271 -
Model-Based Control of a Large-Scale Ball-on-Plate System With Experimental Validation
Kastner, A.; Inga, J.; Blauth, T.; Köpf, F.; Flad, M.; Hohmann, S.
2019. IEEE International Conference on Mechatronics (ICM ), 257–262, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ICMECH.2019.8722850 -
Kooperative Optimalregelung unter eingeschränkter Kommunikation und Information
Köpf, F.; Flad, M.; Hohmann, S.
2019. GMA-Fachausschuss 1.50 Workshop "Grundlagen vernetzter Systeme" (2019), Günzburg, Deutschland, 11.–13. März 2019
-
A Comparison of Concepts for Control Transitions from Automation to Human
Ludwig, J.; Haas, A.; Flad, M.; Hohmann, S.
2018, Oktober. IEEE International Conference on Systems, Man, and Cybernetics (SMC 2018), Miyazaki, Japan, 7.–10. Oktober 2018 -
A Comparison of Concepts for Control Transitions from Automation to Human
Ludwig, J.; Haas, A.; Flad, M.; Hohmann, S.
2018. 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 3201–3206, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2018.00542 -
Evaluating Human Behavior in Manual and Shared Control via Inverse Optimization
Inga, J.; Eitel, M.; Flad, M.; Hohmann, S.
2018. 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2699–2704, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2018.00461 -
Modeling of Human-Centered Cooperative Control by Means of Tracking in Discrete Time Linear Quadratic Differential Games
Lemmer, M.; Köpf, F.; Schwab, S.; Flad, M.; Hohmann, S.
2018. 1st IEEE International Conference on Artificial Intelligence and Knowledge Engineering, AIKE 2018; Laguna Hills; United States; 26 September 2018 through 28 September 2018, 156–161, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/AIKE.2018.00034 -
Driver Observation and Shared Vehicle Control : Supporting the Driver on the Way Back into the Control Loop = Fahrerbeobachtung und kooperative Fahrzeugführung : Wie der Fahrer auf dem Weg zurück in die Regelschleife unterstützt werden kann
Ludwig, J.; Martin, M.; Horne, M.; Flad, M.; Voit, M.; Stiefelhagen, R.; Hohmann, S.
2018. at - Automatisierungstechnik, 66 (2), 146–159. doi:10.1515/auto-2017-0103 -
Identifikation in Differentialspielen basierend auf inverser Optimalsteuerung
Inga, J.; Hohmann, S.
2018, Februar 22. 52. Regelungstechnisches Kolloquium (2018), Boppard, Deutschland, 21.–23. Februar 2018 -
Load Forecasting in Distribution Grids with High Renewable Energy Penetration for Predictive Energy Management Systems
Sauter, P. S.; Karg, P.; Kluwe, M.; Hohmann, S.
2018. 2018 IEEE PES Innovative Smart Grid Technologies Conference Europe, ISGT-Europe 2018; Sarajevo; Bosnia and Herzegovina; 21 October 2018 through 25 October 2018, Art. Nr.: 8571524, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ISGTEurope.2018.8571524 -
A Steering Experiment Towards Haptic Cooperative Maneuver Negotiation
Rothfuß, S.; Grauer, F.; Flad, M.; Hohmann, S.
2018. Proceedings 2018 IEEE International Conference on Systems, Man and Cybernetics SMC 2018, 7-10 October 2018, Miyazaki, Japan, 3207–3212, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2018.00543 -
Adaptive Dynamic Programming for Cooperative Control with Incomplete Information
Köpf, F.; Ebbert, S.; Flad, M.; Hohmann, S.
2018. IEEE International Conference on Systems, Man and Cybernetics (IEEE SMC 2018), Miyazaki, J, October 7-10, 2018, Institute of Electrical and Electronics Engineers (IEEE)
-
Individual Human Behavior Identification Using an Inverse Reinforcement Learning Method
Inga, J.; Köpf, F.; Flad, M.; Hohmann, S.
2017. IEEE International Conference on Systems, Man and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017, 99–104, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2017.8122585 -
Cooperative longitudinal driver assistance system based on shared control
Mosbach, S.; Flad, M.; Hohmann, S.
2017. Proceedings of the 2017 IEEE International Conference on Systems, Man and Cybernetics, SMC 2017, Banff, Canada, 5th - 8th October 2017, 1776–1781, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2017.8122873 -
Neural Network-based Load Forecasting in Distribution Grids for Predictive Energy Management Systems
Sauter, P.; Karg, P.; Pfeifer, M.; Kluwe, M.; Zimmerlin, M.; Leibfried, T.; Hohmann, S.
2017. Die Energiewende : Blueprints for the New Energy Age, Proceedings of the International ETG Congress 2017, World Conference Center, Bonn, 28th - 29th November 2017, 13–18, VDE Verlag -
Cooperative Shared Control Driver Assistance Systems Based on Motion Primitives and Differential Games
Flad, M.; Fröhlich, L.; Hohmann, S.
2017. IEEE transactions on human-machine systems, 47 (5), 711–722. doi:10.1109/THMS.2017.2700435 -
Cooperative Dynamic Vehicle Control Allocation using Time-Variant Differential Games
Ludwig, J.; Gote, C.; Flad, M.; Hohmann, S.
2017. IEEE International Conference on Systems, Man and Cybernetics, SMC, Banff, Alberta, Canada, 5th - 8th October 2017, 117–122, Institute of Electrical and Electronics Engineers (IEEE) -
Inverse Reinforcement Learning for Identification in Linear-Quadratic Dynamic Games
Köpf, F.; Inga, J.; Rothfuß, S.; Flad, M.; Hohmann, S.
2017. IFAC-PapersOnLine, 50 (1), 14902–14908. doi:10.1016/j.ifacol.2017.08.2537 -
Inverse Optimal Control for Identification in Non-Cooperative Differential Games
Rothfuß, S.; Inga, J.; Köpf, F.; Flad, M.; Hohmann, S.
2017. IFAC-PapersOnLine, 50 (1), 14909–14915. doi:10.1016/j.ifacol.2017.08.2538 -
Inverse Optimierung in linear-quadratischen dynamischen Spielen
Inga, J.; Rothfuß, S.; Köpf, F.; Hohmann, S.
2017. GMA-Fachausschuss 1.50 Workshop "Grundlagen vernetzter Systeme", Günzburg, 29.-31. Mai 2017 -
Comparison of the Holomorphic Embedding Load Flow Method with Established Power Flow Algorithms and a New Hybrid Approach
Sauter, P. S.; Braun, C. A.; Kluwe, M.; Hohmann, S.
2017. 2017 Ninth Annual IEEE Green Technologies Conference (GreenTech), Denver, CO, USA, 29-31 March 2017, 203–210, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/GreenTech.2017.36 -
Bridging the Gap between Open Loop Tests and Statistical Validation for Highly Automated Driving
Koenig, A.; Gutbrod, M.; Hohmann, S.; Ludwig, J.
2017. SAE International journal of transportation safety, 5 (1). doi:10.4271/2017-01-1403 -
Kooperative Regelungskonzepte auf Basis der Spieltheorie und deren Anwendung auf Fahrerassistenzsysteme. Dissertation
Flad, M.
2017. KIT Scientific Publishing. doi:10.5445/KSP/1000063300 -
Identifikation des menschlichen Bewegungsverhaltens auf der Basis von Primitiven. Dissertation
Diehm, G.
2017. KIT Scientific Publishing. doi:10.5445/KSP/1000062214
-
Modellierung und Identifikation mithilfe eines erweiterten schaltenden autoregressiven Systems
Inga, J.; Hohmann, S.
2016. GMA-Fachausschuss 1.30 Workshop, Anif/Salzburg,19.-21. September 2016 -
UberManufacturing: A goal-driven collaborative industrial manufacturing marketplace
Mayer, S.; Plangger, D.; Michahelles, F.; Rothfuss, S.
2016. 6th International Conference on the Internet of Things, IOT 2016; Stuttgart; Germany; 7 November 2016 through 9 November 2016, 111–119, Association for Computing Machinery (ACM). doi:10.1145/2991561.2991569 -
Kooperative Regelungskonzepte auf Basis der Spieltheorie und deren Anwendung auf Fahrerassistenzsysteme. Dissertation
Flad, M.
2016. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000062759
-
Iteratives Vorgehen in räumlich getrennten mechatronischen Entwicklungsteams – Das Wechselspiel von Synthese und testbasierter Analyse
Matthiesen, S.; Schmidt, S.; Ludwig, J.; Hohmann, S.
2015. Fachtagung Mechatronik 2015 : Dortmund, 12.03.-13.03.2015). Herausgeber: T. Bertram, 137–142, Technische Universität -
Gray-Box Driver Modeling and Prediction: Benefits of Steering Primitives
Inga, J.; Flad, M.; Diehm, G.; Hohmann, S.
2015. 2015 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Kowloon Tong, Hong Kong, 9–12 October 2015, 3054–3059, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2015.531
-
Integration of an Active Brake Pedal Simulator in the CarMaker Environment for Design and Evaluation of Haptic Driver Assistance Systems
Rothfuss, S.; Flad, M.; Diehm, G.
2014. IPG Automotive applay and innovate -
Active Brake Pedal Feedback Simulator Based on Electric Drive
Flad, M.; Rothfuss, S.; Diehm, G.; Hohmann, S.
2014. SAE 2014 World Congress & Exhibition, Detroit, Michigan, USA, April 8 - 10, 2014 -
Active Brake Pedal Feedback Simulator Based on Electric Drive
Flad, M.; Rothfuss, S.; Diehm, G.; Hohmann, S.
2014. SAE International journal of passenger cars, 7 (1), 189–200. doi:10.4271/2014-01-0325 -
Optimal interaction structure of human drivers cooperation: A pilot study
Ludwig, J.; Diehm, G.; Flad, M.; Hohmann, S.
2014. Proceedings - 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, October 5-8, 2014, 3593–3598, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2014.6974487 -
Subliminal optimal longitudinal vehicle control for energy efficient driving
Sauter, P.; Flad, M.; Hohmann, S.
2014. Proceedings - 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, October 5-8, 2014, 3001–3007, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2014.6974387 -
Steering driver assistance system: A systematic cooperative shared control design approach
Flad, M.; Otten, J.; Schwab, S.; Hohmann, S.
2014. Proceedings - 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, October 5-8, 2014, 3585–3592, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2014.6974486 -
Necessary and sufficient conditions for the design of cooperative shared control
Flad, M.; Otten, J.; Schwab, S.; Hohmann, S.
2014. Proceedings - 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, October 5-8, 2014, 1253–1259, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2014.6974086 -
Driver characterization & driver specific trajectory planning: an inverse optimal control approach
Gote, C.; Flad, M.; Hohmann, S.
2014. Proceedings - 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, October 5-8, 2014, 3014–3021, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2014.6974389 -
Robust Torque Vectoring Control
Kaspar, S.; Ludwig, J.; Bünte, T.; Hohmann, S.
2014. Proceedings of the 19th IFAC World Congress 2014, Cape Town, South Africa, August 24 - 29, 2014; Vol. 12. Ed.: E. Boje, 12023–12028, Curran. doi:10.3182/20140824-6-ZA-1003.02359 -
Individual Driver Modeling via Optimal Selection of Steering Primitives
Flad, M.; Trautmann, C.; Diehm, G.; Hohmann, S.
2014. Proceedings of the 19th IFAC World Congress 2014, Cape Town, South Africa, August 24 - 29, 2014; Vol. 1. Ed.: E. Boje, 696–702, Curran. doi:10.3182/20140824-6-ZA-1003.00223 -
Integration of an Active Brake Pedal Simulator in the CarMaker Environment for Design and Evaluation of Haptic Driver Assistance Systems
Rothfuß, S.; Flad, M.; Hohmann, S.
2014. apply & innovate 2014 - IPG Technologiekonferenz, Karlsruhe, 23. - 24. September 2014
-
Online identification of individual driver steering behaviour and experimental results
Diehm, G.; Maier, S.; Flad, M.; Hohmann, S.
2013. Proceedings - 2013 IEEE International Conference on Systems, Man and Cybernetics (SMC 2013) : Manchester, United Kingdom, 13 - 16 October 2013, 221–227, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2013.44 -
An Identification Method for Individual Driver Steering Behaviour Modelled by Switched Affine Systems
Diehm, G.; Maier, S.; Flad; .; Hohmann, S.
2013. 52nd IEEE Annual Conference on Decision and Control, Florence, Italy, Dec. 10 ‐13, 2013, 3547–3553, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CDC.2013.6760428 -
Experimental validation of a driver steering model based on switching of driver specific primitives
Flad, M.; Trautmann, C.; Diehm, G.; Hohmann, S.
2013. Proceedings - 2013 IEEE International Conference on Systems, Man, and Cybernetics, SMC 2013, Manchester, United Kingdom, 13 - 16 October 2013, 214–220, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SMC.2013.43 -
Identifkation schaltender Systeme auf der Basis von Ausgangstrajektorien
Diehm, G.; Hohmann, S.
2013. GMA FA 1.30 Workshop 2013, Anif/Salzburg, Österreich. GMA Fachausschuss 1.30 „Modellbildung, Identifikation und Simulation in der Automatisierungstechnik“