

M. Sc. Armin Gießler
- Wissenschaftlicher Mitarbeiter
- Gruppe:
- Raum: 202
- Tel.: +49 721 608-43179
- Fax: +49 721 608-42707
- armin giessler ∂does-not-exist.kit edu
Karlsruher Institut für Technologie (KIT) Campus Süd
Institut für Regelungs- und Steuerungssysteme
Geb. 11.20 (Engler-Villa)
Kaiserstr. 12
D-76131 Karlsruhe
Lebenslauf
Studium der Elektro- und Informationstechnik am Karlsruher Institut für Technologie (KIT) mit Auslandssemester an der Linköping Universität in Schweden. Praktische Tätigkeiten bei der Pepperl+Fuchs GmbH in Mannheim im Bereich Identifikationssysteme für Fabrikautomation (2017). Bachelorarbeit bei der Vector Informatik GmbH in Stuttgart zum Thema „Optimierung von parallelisierten Flash-Abläufen innerhalb eines Fahrzeuges“ (2019).
Anschließendes Masterstudium am KIT mit der Vertiefungsrichtung Regelungs- und Steuerungstechnik und Auslandsemester an dem Instituto Superior Técnico in Portugal. Masterarbeit am Institut für Regelungs- und Steuerungssysteme (IRS) zum Thema „Distributed Optimization for Distributed Model Predictive Control“ (2021).
Seit Januar 2022 wissenschaftlicher Mitarbeiter am IRS.
Forschung
Policy-Optimierungsverfahren für den Linear-Quadratischen Regler
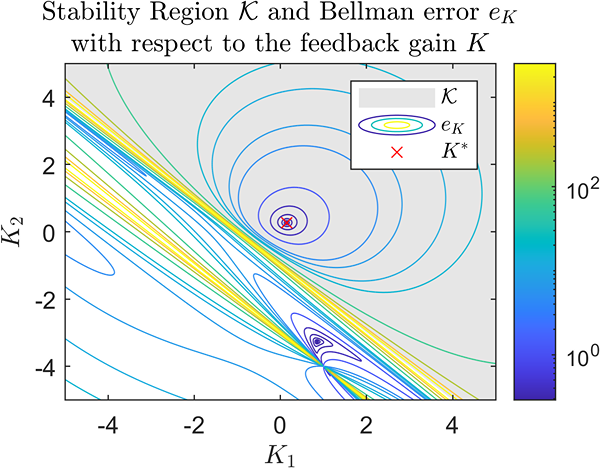
Meine Forschung beschäftigt sich mit innovativen Policy-Optimierungsverfahren für das kontinuierliche Linear Quadratic Regulator (LQR) Problem mit unendlichem Zeithorizont. Ein Schwerpunkt liegt auf der Entwicklung dynamischer Zustandsrückführungsregler, sogenannter Policy Gradient Flows, die das LQR-Problem effizient lösen. Diese dynamischen Regler können polytrope, linear-parameter-variierende Systeme stabilisieren, selbst bei abrupten Parameteränderungen. Dabei wird das zeitvariante LQR-Problem online gelöst, wodurch die transiente Performance des geschlossenen Regelkreises verbessert werden kann.
Zusätzlich entwickle ich datengetriebene Policy Optimierungsverfahren, die eine optimale Rückführung direkt aus gemessenen Eingangs- und Zustandsdaten erlernen, ohne explizite Systemidentifikation. Hierbei untersuche ich sowohl verhaltensbasierte Systemparametrisierungen als auch Integral Reinforcement Learning Ansätze und entwickle daraus neuartige datengetriebene Gradientenflüsse, Policy Iterationen, konvexe Optimierungsverfahren sowie eine datengetriebene kontinuierliche algebraische Riccati Gleichung. Meine Arbeit schlägt eine Brücke zwischen klassischen Regelungsmethoden, Reinforcement Learning Techniken und datengetriebenen Verfahren.
| Titel | Typ |
|---|---|
| Distributed Policy Optimization for continuous-time LQR | Masterarbeit |
Publikationen
Gießler, A.; Malan, A. J.; Hohmann, S.
2025. 2025 IEEE 64th Conference on Decision and Control (CDC), 3761–3768, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CDC57313.2025.11312822
Gießler, A.; Strehle, F.; Illerhaus, J.; Hohmann, S.
2025. arxiv. doi:10.48550/arXiv.2505.22248
Malan, A. J.; Gießler, A.; Strehle, F.; Hohmann, S.
2024. 2024 European Control Conference (ECC), Stockholm, 25th-28th June 2024, 1097 – 1104, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/ECC64448.2024.10590807
Gießler, A.; Jané-Soneira, P.; Malan, A. J.; Hohmann, S.
2023. 2023 62nd IEEE Conference on Decision and Control (CDC), 1555 – 1562, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CDC49753.2023.10383211
Jané Soneira, P.; Gießler, A.; Pfeifer, M.; Hohmann, S.
2023. IEEE 61st Conference on Decision and Control (CDC 22), Cancún, Mexico, December, 6-9, 2022, 3939–3946, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CDC51059.2022.9993364