Vergleichsstudie zwischen intern entwickelten und proprietären Plattformen für digitale Zwillinge und Simulation
- Forschungsthema:Industrial digital twin engineering
- Typ:Bachelorarbeit
- Datum:ab Sofort
- Betreuung:
- Links:Tender
-
In dieser Arbeit sollen verschiedene Plattformen zur Entwicklung von digitalen Zwillingen und zur Simulation im Kontext der Industrierobotik untersucht und mit intern entwickelten Lösungen verglichen werden. Dabei werden die Stärken und Schwächen sowie das Potenzial und die Anwendungsfälle der jeweiligen Optionen analysiert.
Motivation:
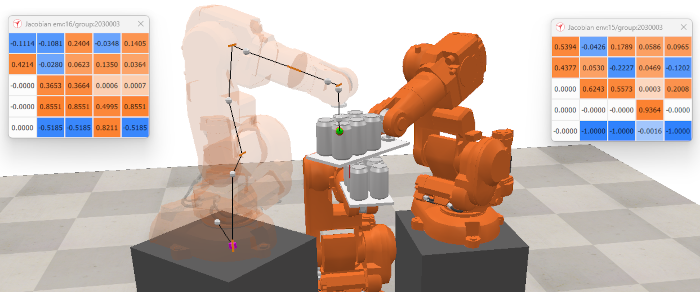
Im sich stetig weiterentwickelnden Bereich der industriellen Automatisierung gewinnen 3D-Simulationsumgebungen für Roboter zunehmend an Bedeutung. Sie vereinfachen nicht nur die Entwicklung und Integration automatisierter Systeme, sondern ermöglichen auch Konzepte wie digitale Zwillinge.
Heute stehen eine Vielzahl von Simulationsplattformen zur Verfügung, von proprietären Lösungen wie NVIDIA Omniverse und CoppeliaSim bis hin zu individuell anpassbaren Open-Source-Alternativen, etwa durch Frameworks wie ROS (Robot Operating System) und plattformübergreifende Grafik-Engines. Diese Plattformen unterscheiden sich erheblich hinsichtlich ihrer Leistungsfähigkeit, Komplexität und Kosten. Kommerzielle Tools bieten oftmals ausgereifte, funktionsreiche Umgebungen, schaffen jedoch eine Abhängigkeit von proprietären Lizenzen und deren dynamischen Kostenstrukturen. Open-Source-Lösungen bieten dagegen die Flexibilität, Simulationen an spezifische Anforderungen anzupassen, ohne eine solche Bindung einzugehen. Diese Flexibilität geht jedoch mit einem erhöhten Entwicklungsaufwand und technischem Mehraufwand einher.
Vor dem Hintergrund dieser vielfältigen Landschaft stehen Ingenieure und Entwickler vor einer entscheidenden Frage: Welche Simulationsplattform eignet sich am besten für eine bestimmte Anwendung? Diese Fragestellung verdeutlicht die Notwendigkeit, die Stärken und Kompromisse verschiedener Umgebungen zu untersuchen und miteinander zu vergleichen.
Ziele:
Diese Arbeit zielt darauf ab, eine detaillierte und umfassende Vergleichsstudie zwischen intern entwickelten Simulationsumgebungen und kommerziellen Lösungen zu erstellen. Zu diesem Zweck sollen verschiedene Anwendungsfälle entworfen werden, die darauf abzielen, unterschiedliche Anforderungen und Zielsetzungen, wie sie typischerweise im Bereich der Automatisierungstechnik vorkommen, zu bewerten. Der Vergleich soll anhand spezifischer Metriken erfolgen, die die jeweiligen Stärken und Kompromisse der untersuchten Ansätze hervorheben und bewerten.
Hilfreiche Vorkenntnisse:
- Interesse an Digital-Twins und Informationsmodelle
- Erste Erfahrungen mit Programmierung in Python und/oder C++
- Erfahrung mit Plattforms wie NVIDIA-Omniverse oder CoppeliaSim hilfreich
- Interesse an Robotische industrielle Prozesse
- Grundkenntnisse in der Robotik hilfreich